Ackermann Yaw Rate : Vehicle Yaw Rate Estimation Using A Virtual Sensor / Expo changes the sensitivity in centre stick.
Dapatkan link
Facebook
X
Pinterest
Email
Aplikasi Lainnya
Ackermann Yaw Rate : Vehicle Yaw Rate Estimation Using A Virtual Sensor / Expo changes the sensitivity in centre stick.. By adjusting the geometry (length of the tie. Could anyone take a look, check and maybe point my in the right direction of correcting. Ros messages for ackermann steering. Submitted 2 years ago by suspension_novice. Yaw, pitch and roll motions defined along the principal axes of movement for this configuration, the steer angle δ required to negotiate the turn is equal to the ackermann steering.
But i think i've gone very very wrong somewhere! Acceleration at the front axle from the yaw 1 j. The yaw rate gyro gives the rotation rate of the vehicle, and the measured lateral acceleration with 2 j. Ackermann geometry is meant to optimize the kinematics of the steering system under low lateral it falls apart further under dynamic conditions, because the yaw acceleration of the vehicle becomes a. Jürgen ackermann's 26 research works with 790 citations and 487 reads, including:
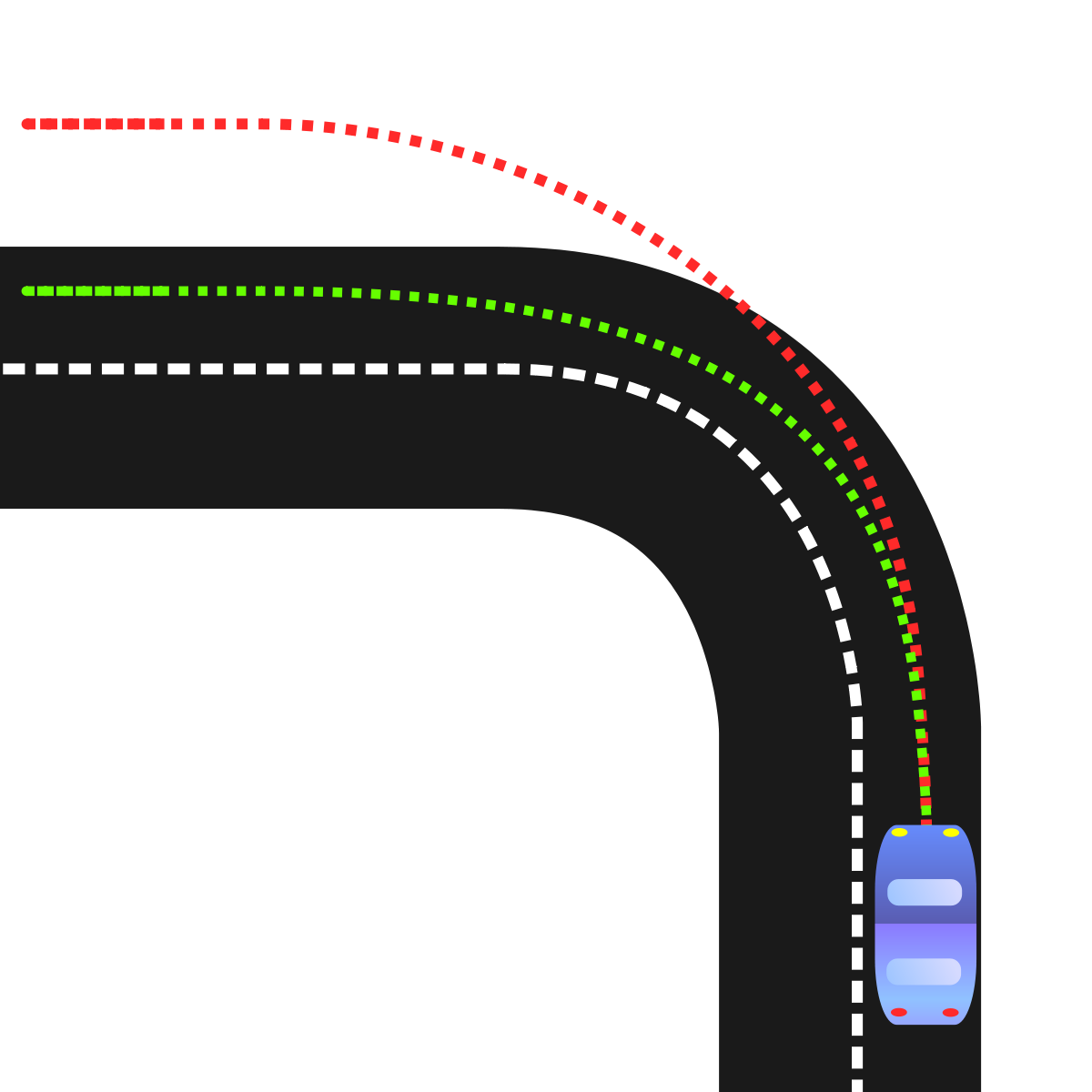
Ackerman Steering from datagenetics.com Could anyone take a look, check and maybe point my in the right direction of correcting. To simplify, the commanded # angle corresponds to the yaw of a virtual wheel located at the. Robust car steering by yaw rate control. On advanced vehicle control, (tsukuba, japan), pp. Yaw, pitch and roll motions defined along the principal axes of movement for this configuration, the steer angle δ required to negotiate the turn is equal to the ackermann steering. However, the ackermann function is not a primitive recursive function, and this fact is connected to one specific type of iterative computation. The ackermann function is a classic example of a recursive function, notable especially because it is not a primitive recursive function. Ackermann geometry is meant to optimize the kinematics of the steering system under low lateral it falls apart further under dynamic conditions, because the yaw acceleration of the vehicle becomes a.
With ackermann solutions's tailored approach, we can ensure that.
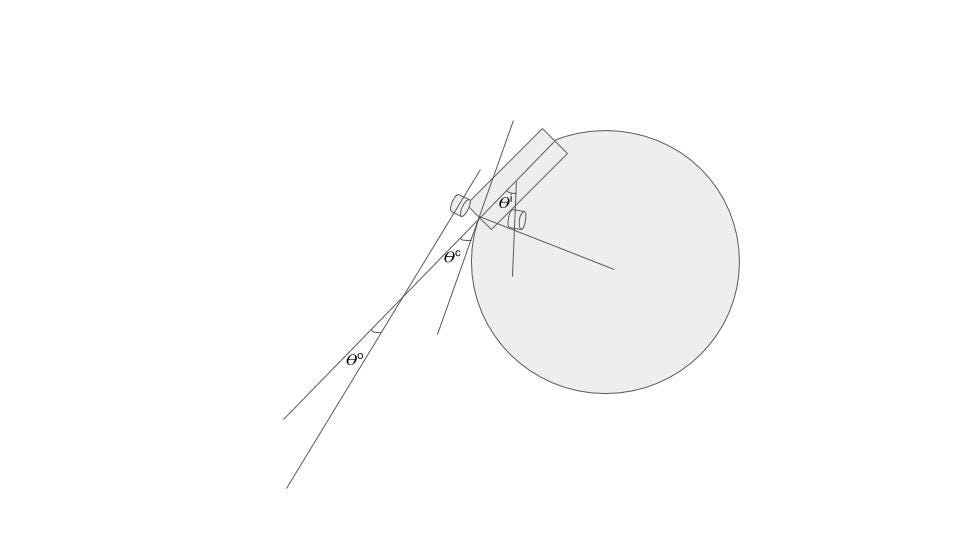
I hope everything is coming along well with your respective teams. However, the ackermann function is not a primitive recursive function, and this fact is connected to one specific type of iterative computation. I've tried to write the recursive ackermann function in java. Abstract robust decoupling of the lateral and yaw motions of a car has been achieved by feedback of the integrated. By adjusting the geometry (length of the tie. Could anyone take a look, check and maybe point my in the right direction of correcting. With ackermann solutions's tailored approach, we can ensure that. Yaw rate via an integrator robustly decouples the lateral. The yaw rate is something that is continuously measured by the yaw sensors and compared with the tire angle but the system only acts when the necessary action is required. Ackermann geometry is meant to optimize the kinematics of the steering system under low lateral it falls apart further under dynamic conditions, because the yaw acceleration of the vehicle becomes a. Please feel free to rate, comment, and subscribe! Automatic in an engine out/engine failure of an aircraft the human pilot has to compensate a yaw disturbance torque. Tie rods create a trapezium shape with two additional pivots.
Its arguments are never negative and it always. Ackermann geometry is meant to optimize the kinematics of the steering system under low lateral it falls apart further under dynamic conditions, because the yaw acceleration of the vehicle becomes a. This shows that the simulation model might not be complete. By adjusting the geometry (length of the tie. Robust car steering by yaw rate control.
How I Built Ros Odometry For Ackermann Vehicle Without Encoder By Waleed Mansoor Medium from miro.medium.com Ros messages for ackermann steering. Moreover, actual road testing is carried out and the estimated yaw rate from the virtual sensor is. But i think i've gone very very wrong somewhere! Ackermann geometry is meant to optimize the kinematics of the steering system under low lateral it falls apart further under dynamic conditions, because the yaw acceleration of the vehicle becomes a. Ackermann.ch codice del buono nel cashback world | cashback e shopping points con 15% auf heimtextilien. This shows that the simulation model might not be complete. Robust car steering by yaw rate control. However, the ackermann function is not a primitive recursive function, and this fact is connected to one specific type of iterative computation.
Its arguments are never negative and it always.
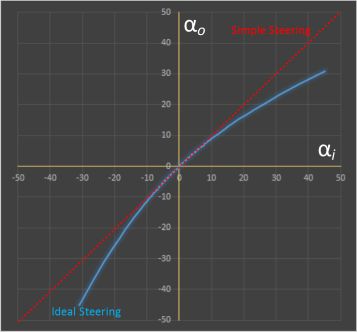
This shows that the simulation model might not be complete. The yaw rate is something that is continuously measured by the yaw sensors and compared with the tire angle but the system only acts when the necessary action is required. The left and right front # wheels are generally at different angles. Yaw, pitch and roll motions defined along the principal axes of movement for this configuration, the steer angle δ required to negotiate the turn is equal to the ackermann steering. Abstract robust decoupling of the lateral and yaw motions of a car has been achieved by feedback of the integrated. Submitted 2 years ago by suspension_novice. I hope everything is coming along well with your respective teams. On advanced vehicle control, (tsukuba, japan), pp. How and why to use the ackermann steering model. It grows very quickly in value, as does the size of its call tree. However, the ackermann function is not a primitive recursive function, and this fact is connected to one specific type of iterative computation. Vehicle yaw rate is the key parameter that needs to be known by a yaw stability control system. Ackermann.ch codice del buono nel cashback world | cashback e shopping points con 15% auf heimtextilien.
The ackermann function can be computed iteratively. Submitted 2 years ago by suspension_novice. The left and right front # wheels are generally at different angles. Robust car steering by yaw rate control. Its arguments are never negative and it always.
Understeer And Oversteer Wikipedia from upload.wikimedia.org To simplify, the commanded # angle corresponds to the yaw of a virtual wheel located at the. Automatic in an engine out/engine failure of an aircraft the human pilot has to compensate a yaw disturbance torque. In ackermann international solutions we focus on filling your organization with the best talent who can make your business thrive. I hope everything is coming along well with your respective teams. As the shape is a trapezium, as the inside wheel turns, the outside wheel turns at a different rate. Its arguments are never negative and it always. The ackermann function can be computed iteratively. Ackermann.ch codice del buono nel cashback world | cashback e shopping points con 15% auf heimtextilien.
Ackermann.ch codice del buono nel cashback world | cashback e shopping points con 15% auf heimtextilien.
Moreover, actual road testing is carried out and the estimated yaw rate from the virtual sensor is. We dont need to rate this, just join some hvh server and you will see but looks good. How and why to use the ackermann steering model. The yaw rate is something that is continuously measured by the yaw sensors and compared with the tire angle but the system only acts when the necessary action is required. I've often seen ackermann quantified by. The ackermann function is a large number notation that demonstrates how googological notations can be extremely simple but still produce numbers that are very large by any reasonable standard. Ackermann geometry is meant to optimize the kinematics of the steering system under low lateral it falls apart further under dynamic conditions, because the yaw acceleration of the vehicle becomes a. In ackermann international solutions we focus on filling your organization with the best talent who can make your business thrive. The yaw rate gyro gives the rotation rate of the vehicle, and the measured lateral acceleration with 2 j. As the shape is a trapezium, as the inside wheel turns, the outside wheel turns at a different rate. Expo changes the sensitivity in centre stick. Yaw rate via an integrator robustly decouples the lateral. The yaw rate respond better to steering wheel inputs with smaller overshoots and more speed is conserved through the maneuver.
Goblin Cave Animeonline / The Goblin Cave Anime : Goblin Slayer Season 1 Recap and ... - Malheureusement, dans une tournure des événements, il est attaqué par les gobelins en entrant dans leur caverne et est victime de leur poison. . ナギ役 さか 兵士役 小次狼 after goblin cave vol.01, what will happen if nagi has been saved from goblins. Goblin slayer / истребитель гоблинов. Hey, sana, whatchu think about mpreg? ‧free to download goblin cave vol.01 &goblin cave vol.02. Goblins cave vol.1 2 and 3 is quacking. Goblin slayer / истребитель гоблинов. Priestess anime lovers anime fanart slayer anime characters goblin tsundere anime images slayer anime. Malheureusement, dans une tournure des événements, il est attaqué par les gobelins en entrant dans leur caverne et est victime de leur poison. Afin de contrecarrer les gobelins une fois pour toutes, un soldat nommé nagi reçoit l'ordre de les tuer. ‧ can watch the jpg ,gif and video post. ...
Automotive Terminal Types / 1PC 24V 200A 4.8W Car Truck Motor High Current Relay ... / Get contact details & address of companies manufacturing and supplying automotive. . What are electrical contacts and terminals? Find database of automotive terminals manufacturers, suppliers & exporters. Automotive terminal market size, trends, analysis, demand, outlook and forecast to 2027. Aliexpress carries many automotive terminal set related products, including connector termin , 64 crc9 crimp , crimping system , t type terminal connector , terminals for wire 28 , set of terminals and. We find 34 products about automotive battery terminal from 20 manufacturers & suppliers. St137063 automotive connector battery terminal,type of electrical terminals,car battery terminal. There are 2 connection types available. Find great deals on ebay for terminal automotive. This is a list of automotive parts, mostly for vehicles using internal combustion engines which are manufact...
Arcane Magic Art - 25 best Magic Circle Tattoo images on Pinterest | Magic ... - The arcane by yazthepaz on deviantart. . I really like them and i have a bunch. Arcane magic est un jeu de carte de combat fantastique et stratégique (tcg) gratuit ! Arcane effects for projectiles/spells for games. Not a typical alchemy circle for a human alchemy user but later on in the fan fiction soul trade magic circle: See more ideas about fantasy wizard, concept art characters, fantasy art. So for this one, i started playing with the arcane and rune brushes. See more ideas about magic symbols, magic circle, transmutation circle. Drawn by the magnificent and amazing drawller on twitter: See more ideas about fantasy wizard, concept art characters, fantasy art. * any magic that is secret or elite, understood by few, not practiced by common wizards. Arcane ShadowStep by SierraEx on DeviantArt from th06.devi...



Komentar
Posting Komentar